
 English
EnglishTư vấn, Tin tức, Tự động hóa Công nghiệp
Robot 6 Trục: Cấu Tạo, Nguyên Lý Hoạt Động và Ứng Dụng Toàn Diện trong Công Nghiệp

Bài viết sẽ giúp bạn khám phá robot 6 trục – một trong những cánh tay robot công nghiệp linh hoạt và phổ biến nhất hiện nay. Chúng ta sẽ đi sâu vào định nghĩa, cấu tạo robot 6 trục chi tiết, nguyên lý hoạt động robot 6 trục dựa trên 6 bậc tự do (6 DOF), cũng như các ứng dụng then chốt và tiêu chí lựa chọn robot phù hợp.
Trục của robot là gì?
Trong ngữ cảnh robot, một trục có thể được hiểu là một bậc tự do (DOF). Nếu một robot có 3 bậc tự do, nó có thể di chuyển theo các trục X-Y-Z. Tuy nhiên, nó không thể nghiêng hoặc xoay. Khi tăng số lượng trục (DOF), robot có thể tiếp cận nhiều không gian hơn.
Lưu ý rằng robot thường được mua với số lượng trục cố định và gần như không thể bổ sung thêm trục sau này. Một cách để xác định số lượng DOF của robot là đếm số lượng động cơ. Tuy nhiên, điều này có thể khó khăn do động cơ thường được tích hợp bên trong thân robot. Nhìn chung, số trục càng cao thì robot càng linh hoạt. Nếu bạn cần robot thực hiện một nhiệm vụ phức tạp, bạn sẽ cần một robot có nhiều trục hơn.
Phân loại robot theo số trục
Dưới đây là mô tả về các loại robot phổ biến theo số lượng DOF của chúng. Lưu ý rằng tùy theo nhà sản xuất, một loại robot có thể có số trục khác nhau, vì vậy hãy xem thông tin này như một hướng dẫn chung.
Robot 3 trục (3-axis robots)
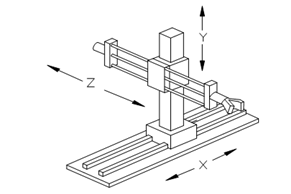
Robot 3 trục – còn được gọi là robot Cartesian hoặc SCARA – có thể so sánh với máy CNC 3 trục hoặc máy in 3D. Chúng cho phép công cụ di chuyển dọc theo ba trục nhờ ba động cơ khác nhau.
Các robot này thường được sử dụng cho các thao tác pick-and-place đơn giản, trong đó bộ phận sẽ được đặt theo cùng một hướng và tại một vị trí cố định. Ví dụ: nếu robot cầm một bộ phận theo một hướng nhất định, nó phải di chuyển theo cùng hướng đó vì công cụ không thể xoay.
Một ví dụ điển hình của robot 3 trục là cần trục.
Robot 4 trục (4-axis robot)
Robot 4 trục có thể xoay bộ phận quanh một trục thứ tư trong khi vẫn di chuyển theo các trục X-Y-Z. Các loại robot SCARA, Delta và một số robot truyền thống thuộc nhóm này.
Robot 4 trục thường có 4 động cơ, trong đó trục thứ tư dùng để xoay công cụ. Ví dụ: nếu một bộ phận nằm trên băng chuyền, robot sẽ cần xác định vị trí của bộ phận (trục X-Y), di chuyển xuống theo chiều cao (trục Z), và cuối cùng xoay công cụ để phù hợp với hướng của bộ phận.
Robot 5 trục (5-axis robot)
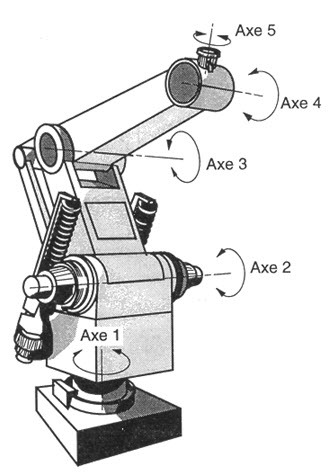
Tại mức này, các robot công nghiệp truyền thống bắt đầu xuất hiện. Nhiều robot công nghiệp có 5 trục, cho phép chúng di chuyển dọc theo các trục X-Y-Z và xoay công cụ quanh hai trục khác.
Nói cách khác, robot có thể xoay quanh trục Z và trục Y, nhưng không thể xoay quanh trục X. Điều này có nghĩa là robot chưa có tự do hoàn toàn và vẫn có những vị trí không thể đạt được.
Một ví dụ về robot 5 trục là máy CNC 5 trục, trong đó công cụ có thể di chuyển dọc theo các trục X-Y-Z, bàn làm việc xoay quanh trục Z (tạo thành trục thứ 4) và bàn làm việc có thể nghiêng quanh một trục khác (tạo thành trục thứ 5).
Robot 6 trục (6- axis robot)
Robot 6 trục có đầy đủ bậc tự do tối thiểu: nó có thể di chuyển theo các trục X-Y-Z và xoay quanh từng trục này.
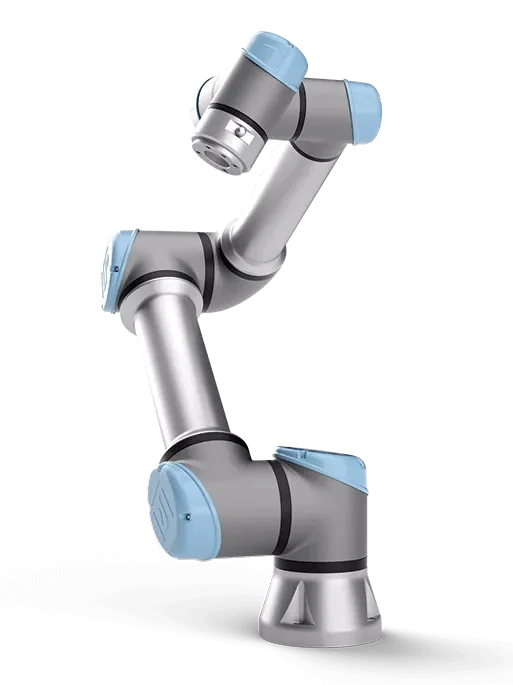
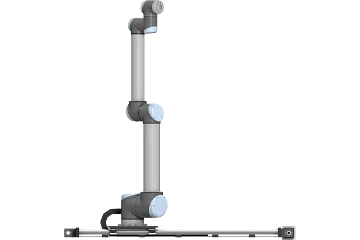
Sự khác biệt giữa robot 5 trục và 6 trục là các trục 4 và 5 của robot 6 trục có thể xoay quanh một trục khác, mang lại sự linh hoạt cao hơn. Một ví dụ điển hình của robot 6 trục là Universal Robot.
Robot 7 trục
Nếu robot 6 trục đã có thể đạt đến mọi vị trí trong không gian, vậy tại sao cần đến robot 7 trục?
Trục thứ 7 giúp robot có thể đạt đến một vị trí theo nhiều cấu hình khớp khác nhau. Điều này giúp tránh các điểm kỳ dị (singularities) và hỗ trợ robot di chuyển quanh các vật cản bằng cách điều chỉnh cánh tay linh hoạt hơn so với robot 6 trục.
Một ví dụ về robot 7 trục là dòng Motoman SDA. Các robot này còn được gọi là robot “dư bậc” (redundant robots) vì có thêm một trục so với mức cần thiết.
Robot 12 và 13 trục
Đây thực chất là hai robot 6 trục kết hợp với nhau để tạo thành một robot hai tay. Nếu đế của robot có thể xoay quanh chính nó, nó sẽ có thêm một trục, nâng tổng số lên 13.
Tuy nhiên, trong không gian 3D, các robot này không thể mở rộng phạm vi hoạt động hơn so với robot 6 hoặc 7 trục, vì chúng vẫn chỉ hoạt động trong ba chiều không gian mà con người có thể nhận thức.
Robot 6 trục là gì?
Robot 6 trục là loại robot công nghiệp sử dụng phổ biến nhất hiện nay, được thiết kế mô phỏng cánh tay con người, mang lại sự linh hoạt vượt trội trong môi trường sản xuất.
Khái niệm robot 6 trục
Robot 6 trục (6-axis robot) là một loại cánh tay robot có khớp nối (Articulated Robot) sở hữu sáu bậc tự do (6 Degrees of Freedom – 6 DOF). Sáu khớp xoay này cho phép robot di chuyển và định hướng công cụ đầu cuối (End-of-Arm Tooling – EOAT) đến gần như bất kỳ vị trí và góc độ nào trong phạm vi làm việc của nó.
Đặc điểm nổi bật nhất của robot 6 trục là khả năng đạt đến tự do hoàn toàn trong không gian 3 chiều, tức là nó có thể thực hiện 3 chuyển động tịnh tiến (X, Y, Z) và 3 chuyển động quay (Pitch, Yaw, Roll) một cách độc lập.
Điểm khác biệt giữa robot 6 trục và robot 3–4–5 trục
Sự khác biệt cốt lõi nằm ở số bậc tự do (DOF), quyết định độ linh hoạt và phức tạp của nhiệm vụ robot có thể thực hiện.
| Loại Robot | Số Bậc Tự Do (DOF) | Chuyển Động Cơ Bản | Ứng Dụng Tiêu Biểu |
|---|---|---|---|
| 3 Trục | 3 | Tịnh tiến X, Y, Z | Gắp và đặt đơn giản, máy CNC 3 trục. |
| 4 Trục | 4 | Tịnh tiến X, Y, Z + 1 Xoay (thường là Yaw) | Robot SCARA, Delta. Thao tác yêu cầu định hướng đơn giản. |
| 5 Trục | 5 | Tịnh tiến X, Y, Z + 2 Xoay (thường thiếu khả năng xoay quanh trục chính) | Máy CNC 5 trục, robot cần nghiêng vật thể. |
| 6 Trục | 6 | Tịnh tiến X, Y, Z + 3 Xoay (Pitch, Yaw, Roll) | Hàn, lắp ráp phức tạp, sơn, gia công bề mặt. Linh hoạt tối đa. |
| 7 Trục | 7 (Dư bậc) | 6 DOF cơ bản + 1 trục phụ | Giúp robot tránh vật cản, tránh điểm kỳ dị (singularity), tăng phạm vi làm việc. |
Tại sao robot 6 trục được sử dụng rộng rãi trong sản xuất?
Robot 6 trục chiếm ưu thế trong các dây chuyền sản xuất hiện đại nhờ vào:
- Tính linh hoạt cao: Khả năng mô phỏng gần như hoàn hảo chuyển động của cánh tay con người cho phép chúng thực hiện các tác vụ phức tạp, đa chiều.
- Đa nhiệm: Một robot có thể dễ dàng chuyển đổi giữa các ứng dụng như hàn, lắp ráp, hoặc sơn chỉ bằng cách thay đổi công cụ đầu cuối và chương trình.
- Độ chính xác và độ lặp lại: Đạt được độ chính xác cao trong việc lặp lại quỹ đạo, rất quan trọng cho các quy trình chất lượng cao.
Cấu tạo của robot 6 trục công nghiệp
Để hiểu rõ cách thức hoạt động, cần nắm vững cấu tạo cơ bản của robot 6 trục công nghiệp, bao gồm cơ cấu cơ khí và hệ thống điều khiển.
6 khớp/6 trục chuyển động (Joint 1 → Joint 6)
Đây là các khớp xoay, quyết định 6 bậc tự do của robot:
| Khớp | Tên gọi | Chức năng | Chuyển động |
|---|---|---|---|
| Joint 1 (J1) | Trục xoay đế (Base) | Xoay toàn bộ cánh tay robot quanh trục đứng (Yaw). | Quyết định vị trí ngang. |
| Joint 2 (J2) | Trục vai (Shoulder) | Đưa cánh tay lên xuống (Pitch). | Quyết định tầm cao. |
| Joint 3 (J3) | Trục khuỷu (Elbow) | Gấp/duỗi cánh tay (Pitch). | Quyết định tầm với (độ xa). |
| Joint 4 (J4) | Trục cổ tay 1 (Wrist Roll) | Xoay cổ tay. | Điều chỉnh góc xoay của công cụ. |
| Joint 5 (J5) | Trục cổ tay 2 (Wrist Pitch) | Nghiêng cổ tay lên xuống. | Điều chỉnh góc nghiêng của công cụ. |
| Joint 6 (J6) | Trục cổ tay 3 (Wrist Yaw) | Xoay cổ tay quanh trục dọc. | Điều chỉnh hướng của công cụ. |
Bộ điều khiển (Robot Controller)
Bộ điều khiển là “bộ não” quản lý mọi hoạt động của robot.
- Chức năng và vai trò:
- Thực thi chương trình đã lập trình.
- Điều khiển các động cơ servo (vị trí, tốc độ, gia tốc).
- Xử lý tín hiệu từ các cảm biến và thiết bị ngoại vi.
- Tính toán chuyển đổi tọa độ (ví dụ: từ Joint sang Cartesian).
- Các dòng điều khiển phổ biến: Mỗi thương hiệu có bộ điều khiển riêng như ABB IRC5, Yaskawa DX200, KUKA KRC4, Fanuc R-30iB Plus, v.v.
Bộ truyền động – Động cơ servo – Encoder
- Động cơ Servo (Servo Motor): Là các động cơ điện xoay chiều (AC) được sử dụng để tạo ra chuyển động cho mỗi khớp. Servo cho phép điều khiển tốc độ và vị trí một cách chính xác.
- Bộ truyền động (Gearbox): Sử dụng các loại hộp giảm tốc (thường là Harmonic Drive hoặc Cycloidal) để tăng mô-men xoắn và giảm tốc độ, đảm bảo robot có thể nâng tải nặng và di chuyển ổn định.
- Encoder: Là thiết bị phản hồi vị trí (Position Feedback) gắn liền với động cơ hoặc khớp, giúp bộ điều khiển biết được góc quay chính xác của mỗi trục.
Tay gắp/EOAT (End of Arm Tooling)
EOAT là công cụ được gắn vào khớp cuối cùng (J6), quyết định chức năng chính của robot:
- Kẹp khí nén (Pneumatic Grippers): Sử dụng áp suất không khí để kẹp hoặc nhả vật thể.
- Kẹp điện (Electric Grippers): Sử dụng động cơ điện, thường có thể điều chỉnh lực và vị trí kẹp chính xác.
- Mỏ hàn MIG/TIG: Dùng cho các ứng dụng hàn tự động.
- Hút chân không (Vacuum Grippers): Sử dụng cốc hút để nhấc các vật liệu có bề mặt phẳng như kính, tấm kim loại, hoặc bao bì.
- Đầu phun sơn/keo, dụng cụ mài/đánh bóng, cảm biến kiểm tra.
Tủ điện điều khiển và hệ thống kết nối ngoại vi
Bao gồm các thiết bị điện tử như nguồn điện, bộ nguồn dự phòng, các module I/O (Input/Output) để kết nối robot với băng tải, cảm biến an toàn, PLC chính của nhà máy và các thiết bị ngoại vi khác.
Nguyên lý hoạt động của robot 6 trục
Robot 6 trục hoạt động dựa trên sự phối hợp nhịp nhàng giữa cơ học và thuật toán điều khiển phức tạp.
Cơ chế chuyển động 6 bậc tự do (6 DOF)
6 bậc tự do cho phép robot di chuyển theo 6 phương khác nhau, đạt đến mọi điểm trong không gian làm việc của nó với bất kỳ góc định hướng nào. Điều này được thực hiện thông qua việc điều chỉnh góc quay của 6 khớp J1 đến J6.
Hệ trục tọa độ (Joint – XYZ – Tool – User Frame)
Để điều khiển robot, các hệ tọa độ được sử dụng:
- Joint Frame (Tọa độ khớp): Mô tả vị trí bằng góc quay của từng khớp (ví dụ: $J1 = 30^{\circ}, J2 = 45^{\circ}, \dots$).
- XYZ Frame (Tọa độ Cartesian/World): Mô tả vị trí của tâm công cụ (TCP) trong không gian bằng tọa độ (X, Y, Z) và góc định hướng (Rx, Ry, Rz) so với gốc tọa độ toàn cục.
- Tool Frame (Tọa độ công cụ): Gắn với công cụ (EOAT), giúp lập trình viên xác định hướng di chuyển từ góc nhìn của công cụ.
- User Frame (Tọa độ người dùng): Gắn với một đối tượng hoặc bàn làm việc cố định, giúp đơn giản hóa việc lập trình trên một đối tượng nghiêng.
Điều khiển chuyển động: Interp, Path Control, Speed Control
- Interp (Interpolation): Thuật toán tính toán quỹ đạo chuyển động giữa hai điểm A và B, đảm bảo chuyển động mượt mà và chính xác. Các kiểu Interp phổ biến là Joint (di chuyển nhanh, không theo đường thẳng), Linear (di chuyển theo đường thẳng), và Circular (di chuyển theo cung tròn).
- Path Control: Đảm bảo robot bám sát quỹ đạo đã được tính toán.
- Speed Control: Điều chỉnh tốc độ di chuyển tổng thể và tốc độ của từng khớp.
Quy trình hoạt động cơ bản của robot 6 trục
- Lập trình: Thiết lập các điểm (points) và quỹ đạo (path) mà robot cần di chuyển.
- Set điểm (TCP, Zeroing):
- TCP (Tool Center Point): Xác định chính xác vị trí tâm công cụ (điểm tác động của EOAT). Đây là bước thiết yếu để robot di chuyển chính xác.
- Zeroing: Đặt lại vị trí ban đầu (home position) của các khớp.
- Chạy thử (Test Run): Chạy chương trình ở tốc độ chậm để kiểm tra va chạm, sai số quỹ đạo.
- Sản xuất (Production): Chạy chương trình ở tốc độ tối ưu và tích hợp vào dây chuyền sản xuất.
Lợi ích khi sử dụng robot 6 trục
Sử dụng robot 6 trục mang lại nhiều lợi ích đáng kể cho doanh nghiệp, đặc biệt trong bối cảnh sản xuất hiện đại và cạnh tranh ngày càng khốc liệt:
- Linh hoạt và đa năng: Với khả năng vận hành đa hướng và chuyển động mượt mà theo 6 trục, robot có thể thực hiện nhiều nhiệm vụ phức tạp như lắp ráp, hàn, sơn, và vận chuyển với phạm vi hoạt động rộng, giúp tối ưu hóa quy trình sản xuất.
- Độ chính xác cao: Công nghệ tiên tiến cho phép robot đạt độ chính xác và độ lặp lại vượt trội, giảm thiểu sai sót và đảm bảo chất lượng sản phẩm ổn định.
- Tích hợp dễ dàng vào dây chuyền sản xuất: Giao diện lập trình thân thiện cùng khả năng tùy biến cao giúp robot dễ dàng được tích hợp vào các hệ thống tự động hóa hiện đại, rút ngắn thời gian triển khai và vận hành.
- An toàn khi làm việc cùng con người: Các robot 6 trục, đặc biệt là dòng robot cộng tác, được trang bị công nghệ cảm biến và thiết kế an toàn, giúp đảm bảo sự tương tác an toàn giữa robot và nhân viên, mở ra nhiều cơ hội cho sản xuất linh hoạt.
- Tiết kiệm chi phí và tăng hiệu quả: Khi áp dụng tự động hóa với robot 6 trục, doanh nghiệp có thể giảm chi phí lao động, nâng cao năng suất và giảm thiểu rủi ro trong sản xuất, từ đó gia tăng lợi thế cạnh tranh trên thị trường.
Các loại robot 6 trục phổ biến trên thị trường
Thị trường robot 6 trục rất đa dạng với nhiều thương hiệu hàng đầu thế giới:
- Robot 6 trục Universal Robots (UR): Tiên phong trong lĩnh vực Robot Cộng Tác (Cobot). Đặc điểm: Dễ lập trình, an toàn khi làm việc cùng con người, phù hợp với các tác vụ tải trọng nhẹ đến trung bình (từ 3kg đến 16kg).
- Robot 6 trục ABB: Thương hiệu hàng đầu, cung cấp các robot công nghiệp đa dạng về tải trọng và tầm với, nổi tiếng với các dòng IRB và bộ điều khiển IRC5. Phân khúc: Công nghiệp nặng và tốc độ cao.
- Robot 6 trục KUKA: Thương hiệu Đức, nổi bật với các robot có tải trọng lớn và độ chính xác cao (dòng KR CUBE). Phân khúc: Ô tô, đúc, hàn.
- Robot 6 trục Yaskawa (Motoman): Cung cấp dải sản phẩm rộng, đặc biệt mạnh mẽ trong các ứng dụng hàn và xử lý vật liệu. Phân khúc: Tốc độ cao, bền bỉ.
- Robot 6 trục Fanuc: Nổi tiếng về độ bền, độ tin cậy và khả năng hoạt động liên tục trong môi trường khắc nghiệt. Phân khúc: Công nghiệp ô tô, kim loại.
- Robot 6 trục Mitsubishi/Kawasaki/Epson/Yamaha/Hiwin/Inovance: Cung cấp các giải pháp chuyên biệt, thường tập trung vào phân khúc tải trọng nhẹ, độ chính xác cao cho ngành điện tử, lắp ráp và các ứng dụng giá cả cạnh tranh.
Ứng dụng của robot 6 trục trong công nghiệp
Nhờ sự linh hoạt, robot 6 trục gần như có mặt trong mọi ngành công nghiệp.
Hàn MIG/TIG tự động
Robot 6 trục đảm bảo tốc độ và chất lượng đường hàn ổn định, chính xác, đặc biệt với các chi tiết phức tạp, giúp tăng năng suất và giảm thiểu khuyết tật hàn.
Bốc xếp, đóng gói, palletizing
Với tầm với và khả năng chịu tải tốt, robot 6 trục được sử dụng để di chuyển hàng hóa, sắp xếp sản phẩm lên pallet (palletizing) một cách tự động, giảm sức lao động và tăng tốc độ xử lý kho bãi.
Lắp ráp linh kiện điện tử
Độ chính xác và khả năng lặp lại cao của robot 6 trục là lý tưởng cho việc lắp ráp các chi tiết nhỏ, phức tạp trong sản xuất điện thoại, máy tính, và các thiết bị điện tử.
Sơn – phun keo – phủ vật liệu
Robot đảm bảo lớp phủ đồng đều, tốc độ phun ổn định, đặc biệt quan trọng trong ngành công nghiệp ô tô và sản xuất đồ gỗ cao cấp. J4, J5, J6 đóng vai trò quan trọng trong việc định hướng đầu phun.
Gia công CNC – pick & place
Robot thực hiện việc gắp (pick) phôi từ kho và đặt (place) vào máy CNC (tải phôi/machine tending), sau đó lấy thành phẩm ra. Chúng cũng được dùng để thực hiện các thao tác gia công bề mặt như mài, đánh bóng.
Ứng dụng trong công nghiệp ô tô, điện tử, logistics
- Ô tô: Hàn thân xe, lắp ráp động cơ, sơn.
- Điện tử: Lắp ráp PCB, kiểm tra chất lượng (QC), dán nhãn.
- Logistics: Sắp xếp hàng hóa, phân loại bưu kiện.
Lập trình robot 6 trục
Có hai phương pháp lập trình chính, cùng với yêu cầu về ngôn ngữ và kỹ năng.
Lập trình online (Teach Pendant)
Sử dụng bộ điều khiển tay cầm (Teach Pendant) để di chuyển robot đến từng điểm mong muốn và ghi lại tọa độ. Phương pháp này trực quan, phù hợp cho các tác vụ đơn giản và điều chỉnh nhanh.
Lập trình offline (RobotStudio, RoboDK, Melfa Works…)
Sử dụng phần mềm mô phỏng 3D trên máy tính để tạo chương trình trước khi triển khai thực tế. Phương pháp này giúp rút ngắn thời gian lắp đặt, tối ưu hóa quỹ đạo và tránh va chạm trong môi trường ảo.
Ngôn ngữ lập trình theo thương hiệu (ABB RAPID, KUKA KRL…)
Mỗi nhà sản xuất có ngôn ngữ lập trình riêng:
- ABB: RAPID
- KUKA: KRL (KUKA Robot Language)
- Fanuc: KAREL
- Universal Robots: Polyscope (giao diện đồ họa trực quan)
Các kỹ năng cần có để vận hành robot 6 trục
- Kiến thức cơ bản về cơ học, điện tử và tự động hóa.
- Hiểu biết về các hệ trục tọa độ (Tool, User, World).
- Khả năng đọc và viết chương trình logic (Boolean logic, If/Else, For loop).
- Kỹ năng xử lý lỗi và an toàn vận hành.
Ưu điểm và hạn chế của robot 6 trục
Ưu điểm
- Linh hoạt vượt trội: Khả năng đạt đến 6 bậc tự do cho phép thực hiện hầu hết mọi nhiệm vụ.
- Độ chính xác và độ lặp lại cao: Đảm bảo chất lượng sản phẩm đồng đều.
- Tải trọng và tầm với đa dạng: Dễ dàng tìm thấy robot phù hợp với yêu cầu từ 3kg đến hàng trăm kg.
- Điểm tự do lớn: Thao tác các công việc phức tạp, yêu cầu quỹ đạo uốn lượn.
Hạn chế
- Giá thành cao: Chi phí đầu tư ban đầu cao hơn so với robot 3-4 trục đơn giản.
- Lập trình phức tạp: Cần kỹ sư có chuyên môn sâu về tính toán tọa độ và quỹ đạo chuyển động (trừ các dòng Cobot có giao diện thân thiện).
- Khó bảo trì: Nếu không có đội ngũ kỹ thuật nội bộ hoặc nhà cung cấp chuyên nghiệp, việc bảo trì và sửa chữa có thể tốn kém.
So sánh robot 6 trục với các loại robot khác
Robot 4 trục (SCARA)
SCARA (Selective Compliance Assembly Robot Arm) chỉ có 4 DOF, chủ yếu dùng cho các tác vụ Pick & Place tốc độ cao trên mặt phẳng ngang. Robot 6 trục linh hoạt hơn nhiều vì có thể định hướng công cụ theo mọi góc.
Robot Delta
Robot Delta (Spider Robot) có tốc độ cực nhanh, chuyên dùng cho các tác vụ Pick & Place tải trọng siêu nhẹ. Phạm vi làm việc giới hạn ở một khu vực hình cầu/bán cầu phía dưới. Robot 6 trục linh hoạt hơn về không gian và tải trọng.
Robot Cartesian
Di chuyển trên 3 trục thẳng (X, Y, Z). Thích hợp cho các nhiệm vụ trong không gian hình hộp. Robot 6 trục được ưu tiên khi cần di chuyển cong, nghiêng, hoặc khi không gian lắp đặt bị giới hạn.
Khi nào nên dùng robot 6 trục?
Bạn nên đầu tư vào robot 6 trục khi:
- Nhiệm vụ yêu cầu công cụ phải nghiêng, xoay hoặc tiếp cận các góc khuất (ví dụ: hàn, sơn, lắp ráp chi tiết 3D).
- Cần robot thực hiện nhiều nhiệm vụ khác nhau trên cùng một dây chuyền (đa năng).
- Cần độ chính xác tuyệt đối trong việc định hướng công cụ.
Kinh nghiệm chọn robot 6 trục phù hợp
Chọn theo tải trọng – tầm với
Đây là hai yếu tố quan trọng nhất. Tải trọng (Payload) phải lớn hơn tổng trọng lượng của EOAT và vật phẩm lớn nhất. Tầm với (Reach) phải bao phủ toàn bộ khu vực làm việc.
Chọn theo ứng dụng (hàn, pick & place, lắp ráp…)
- Hàn/Sơn/Gia công: Cần độ chính xác lặp lại cao và khả năng xoay cổ tay linh hoạt (J4, J5, J6 tốt).
- Pick & Place/Logistics: Ưu tiên tầm với rộng và tốc độ cao.
- Lắp ráp: Ưu tiên độ chính xác và khả năng làm việc an toàn, đặc biệt là Cobot.
Chọn theo thương hiệu – chi phí – hỗ trợ kỹ thuật
- Thương hiệu: Các thương hiệu lớn (UR, ABB, Fanuc, KUKA) đảm bảo chất lượng, nhưng đi kèm chi phí cao hơn.
- Chi phí: Cân đối giữa chi phí đầu tư ban đầu và tổng chi phí sở hữu (TCO) bao gồm bảo trì, vận hành và chi phí đào tạo.
- Hỗ trợ kỹ thuật: Rất quan trọng tại Việt Nam. Nên chọn nhà cung cấp uy tín, có đội ngũ kỹ sư chuyên sâu để đảm bảo thời gian khắc phục sự cố nhanh chóng.
Lưu ý khi đầu tư robot lần đầu
- Thử nghiệm (PoC – Proof of Concept): Luôn yêu cầu nhà cung cấp thực hiện thử nghiệm trên ứng dụng thực tế của bạn trước khi quyết định đầu tư.
- Đào tạo: Đảm bảo nhân viên được đào tạo bài bản về lập trình và vận hành an toàn.
- An toàn: Tích hợp đầy đủ các tính năng và cảm biến an toàn (ví dụ: hàng rào bảo vệ, chức năng dừng khẩn cấp).
Tại sao nên chọn Universal Robots?
Universal Robots cam kết mang tới giải pháp cánh tay robot công nghiệp 6 trục linh hoạt, an toàn và dễ sử dụng đến các doanh nghiệp ở mọi quy mô, trên toàn thế giới. Chúng tôi phát triển robot cộng tác công nghiệp để tự động hoá và sắp xếp các quy trình công nghiệp lặp lại. Cách tiếp cận này cho phép các bộ phận sản xuất có thể phân công nhân sự làm những công việc thú vị hơn – để họ phát triển năng lực trong những công việc có nhiều thách thức mới, từ đó tăng giá trị cho công ty.
Các dòng robot Universal Robots phổ biến
- UR3e: Với khả năng chịu tải lên đến 3 kg, UR3e là giải pháp lý tưởng cho các tác vụ chính xác, nhẹ nhàng như lắp ráp chi tiết, kiểm tra chất lượng và các ứng dụng trong không gian làm việc hạn chế.
- UR5e: Với tải trọng tối đa 5 kg, UR5e cân bằng giữa kích thước nhỏ gọn và phạm vi hoạt động rộng, phù hợp cho các nhiệm vụ đóng gói, lắp ráp và chuyển giao vật liệu nhẹ trong môi trường sản xuất hiện đại.
- UR10e: với khả năng chịu tải 10 kg, mang lại phạm vi vận hành rộng và hiệu suất cao cho các ứng dụng đòi hỏi tương tác với các hệ thống tự động phức tạp, từ lắp ráp đến vận chuyển các bộ phận công nghiệp.
- UR16e: Dòng mạnh mẽ nhất với tải trọng lên đến 16 kg, UR16e được thiết kế cho những ứng dụng nặng, đảm bảo hiệu suất ổn định trong môi trường sản xuất khắc nghiệt và các quy trình đòi hỏi độ chính xác cùng khả năng chịu lực cao.
Servo Dynamics Engineering: Nhà phân phối được ủy quyền của Universal Robot tại Việt Nam
Universal Robots cam kết mang tới giải pháp cánh tay robot cộng tác công nghiệp 6 trục (Cobot) linh hoạt, an toàn và dễ sử dụng đến các doanh nghiệp ở mọi quy mô. Các dòng robot UR nổi bật như UR3e (3kg), UR5e (5kg), UR10e (10kg) và UR16e (16kg) được thiết kế để tự động hóa các quy trình lặp lại, cho phép nhân sự tập trung vào công việc có giá trị cao hơn.
Servo Dynamics tự hào là nhà phân phối chính thức của Universal Robots tại Việt Nam. Chúng tôi cam kết cung cấp các giải pháp robot cộng tác chất lượng cao, dịch vụ tư vấn, lắp đặt và hỗ trợ kỹ thuật tận tình, giúp khách hàng khai thác tối đa tiềm năng của Cobot trong sản xuất.
Khám phá các sản phẩm của Universal Robots







Xem thêm

Nhà phân phối Universal Robots Việt Nam
Giới thiệu về Universal Robots Được thành lập vào năm 2005 tại Đan Mạch, Universal [...]
Th9

Cánh tay robot công nghiệp – Cấu tạo, nguyên lý, phân loại và ứng dụng
Cánh tay Robot công nghiệp là tài sản không thể thiếu trong lĩnh vực sản [...]
Th3

Cobot (Robot cộng tác) là gì? Tính năng, lợi ích và cách lựa chọn cobot phù hợp
Cobots (Robot cộng tác) là một loại robot được thiết kế để làm việc cùng [...]
Th11

Cobots Giảm 50% Công Việc Nâng Hạng Nặng cho Công Nhân
Thách thức Là một trong những nhà sản xuất thịt lớn nhất thế giới, Danish [...]
Th12

Universal Robots | Robot Cộng Tác Hỗ Trợ Khôi Phục Thị Lực
Thách thức Trong số các giải pháp mà Aurolab cung cấp cho các tổ chức [...]
Th11

Universal Robots | UR20 tối ưu quy trình đóng gói tại Ornua
Chúng tôi đã xem xét việc đóng gói pallet như là khu vực đầu tiên [...]
Th11

L’Oréal tự động hóa trung tâm nghiên cứu tóc
Thách Thức ‘Trong bộ phận MTI (Phương pháp và Kỹ thuật Đổi mới) của chúng [...]
Th10

